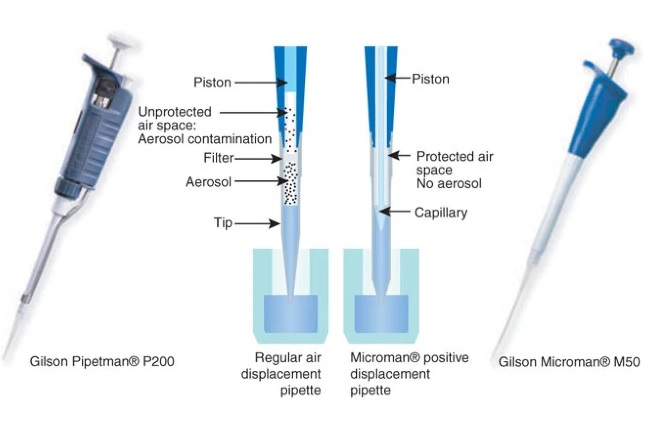
میکروپیپت های مکانیکی جابجایی (Mechanical displacement pipettes) بیش از 50 سال است که در طیف وسیعی از کاربردهای آزمایشگاهی و تحقیقات علمی مورد استفاده قرار گرفته اند. این میکروپیپت ها کاربر پسند بوده و می توان از آنها برای حجم برداری انواع محلول ها استفاده کرد. مکانیسم کار این نوع میکروپیپت های جابجایی، ساده است. دکمه حجم برداری فشار داده می شود و جابجایی پیستون باعث می شود مایع حرکت کند. دو نوع میکروپیپت جابجایی وجود دارد: 1) میکروپیپت بر اساس مکانیسم جابجایی هوا، 2) میکروپیپت بر اساس مکانیسم جابجایی مثبت. مکانیسم عملکردی هر دو نوع میکروپیپت تقریباً یکسان است، با این حال، در میکروپیپت با جابجایی هوا، یک بالشتک هوا بین پیستون و مایع کشیده شده وجود دارد، در حالیکه که در میکروپیپت جابجایی مثبت، مایع در تماس مستقیم با سطح پیستون است. در ادامه، مکانیسم عمل میکروپیپت های جابجایی هوا و جابجایی مثبت و همچنین تفاوت های کلیدی بین این دو مورد بحث قرار می گیرد.
اساس پایپتینگ و حجم برداری
سیستم های حجم برداری مایع بر اساس دو اصل فیزیکی متفاوت کار می کنند: 1) جابجایی هوا 2) جابجایی مثبت.
مکانیسم جابه جایی هوا (بالشتک هوا)
میکروپیپت های مبتنی بر بالشتک هوا از یک سیستم سیلندر-پیستون تشکیل شده اند که اندازه گیری واقعی مایع را انجام می دهند. یک بالشتک هوا (یا هوای مرده)، بین نمونه درون تیپ و پیستون داخل پیپت قرار گرفته و آنها را از هم جدا می کند. بالشتک هوا که توسط پیستون حرکت می کند مانند یک فنر الاستیک عمل می کند و حرکت پیستون به سمت بالا باعث ایجاد خلاء جزئی در تیپ شده و باعث می شود مایع به داخل آن کشیده شود. به دلیل انبساط این حجم هوا، حجم جابجا شده توسط پیستون تقریباً، 2% تا 4% بیشتر از حجم مایع کشیده شده مورد نیاز می باشد. این انبساط، توسط فاکتوری جبران می شود که حجم مرده و حداکثر ارتفاع بالارفتن (lift height) را در تیپ در نظر می گیرد. در میکروپیپت های مبتنی بر بالشتک هوا، طراحی باید طوری صورت گیرد که تأثیر دما، فشار و رطوبت هوا به حداقل برسد تا صحت حجم برداری مختل نشود.
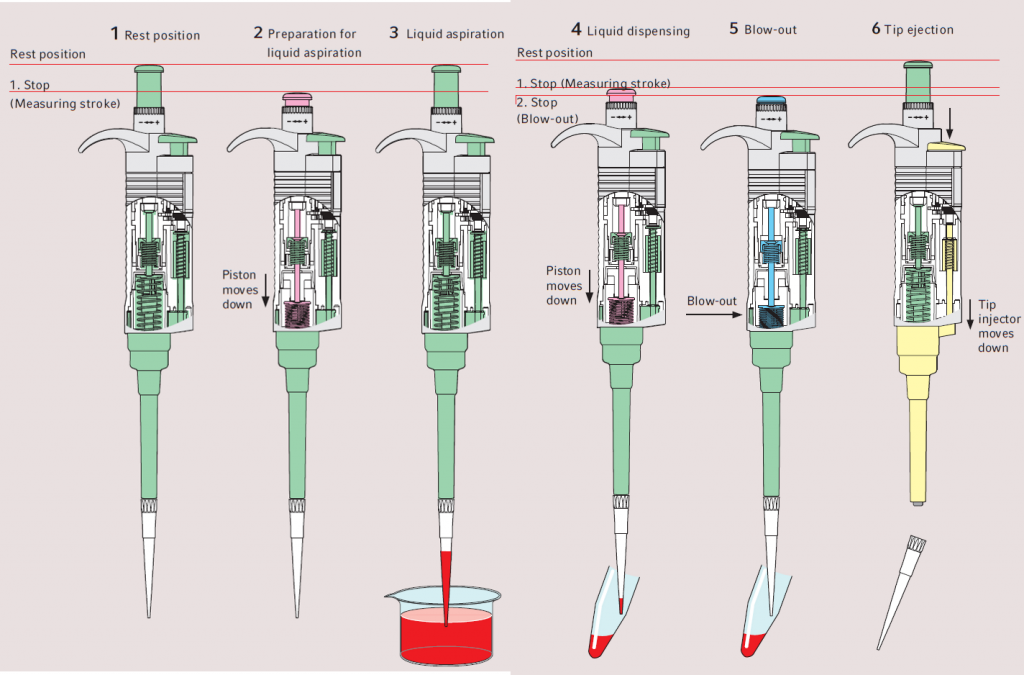
شکل بالا طراحی میکروپیپت مبتنی بر بالشتک هوا را در حالت استراحت (1) نشان می دهد. برای آماده شدن جهت آسپیراسیون مایع (2)، دکمه حجم برداری تا اولین ایستگاه فشار داده می شود (measuring stroke). پیستون به سمت پایین حرکت میکند و حجمی از هوا را جابجا میکند که مطابق با حجم هوای انتخاب شده مایع است. برای آسپیراسیون مایع (3) تیپ به صورت عمودی در مایع قرار می گیرد. همانطور که دکمه حجم برداری به آرامی رها می شود و به سمت عقب حرکت می کند، یک خلاء جزئی در تیپ ایجاد می شود و حجم مورد نیاز از طریق دهانه تیپ آسپیره می شود. برای ریختن مایع (4)، دکمه حجم برداری به آرامی تا اولین توقف فشار داده می شود (measuring stroke).
پیستون به سمت پایین حرکت می کند و تیپ را خالی می کند. برای خالی کردن کامل تیپ (“عملکرد دمیدن (blow-out)”، 5)، دکمه حجم برداری تا ایستگاه دوم فشار داده می شود (blow-out) و پیپت در حالی که دکمه در وضعیت فشرده قرار دارد، از مایع بیرون کشیده می شود و نوک آن بر روی بدنه ظرف کشیده می شود تا تمام مایع چسبیده بر روی تیپ به ظرف منتقل شود. پس از اینکه دکمه حجم برداری رها شد، پیستون به حالت استراحت باز می گردد(6). عمق غوطه وری تیپ درون مایع، تاثیر بسزایی را در نتیجه دارد، به نحوی که اگر تیپ بیش از حد در مایع غوطه ور شود، قطراتی در خارج و بر روی سطح تیپ تشکیل می شود که احتمالاً باعث اشتباه در حجم ریخته شده می شود. اگر تیپ به اندازه کافی در مایع غوطه ور نشود، تلاطم (turbulence) ایجاد می شود و حجم نادرستی آسپیره می شود.
مکانیسم جابجایی مثبت
سیستمهای حجم برداری که بر اساس مکانیسم جابجایی مثبت کار میکنند، برای انواع دیگری از کاربردها مناسب هستند. چنین کاربردهایی عبارتند از: حجم برداری مایعات با فشار بخار بالا، حجم برداری مایعات با ویسکوزیته یا چگالی بالا و کاربردهایی در زیست شناسی مولکولی مانند واکنش زنجیره ای پلیمراز (PCR)، که نیاز به عدم وجود ذرات معلق در هوا برای جلوگیری از آلودگی دارند.
دقت توزیع سیستمهای حجم برداری با جابجایی مثبت تا حد زیادی و بیشتر از سیستمهای مبتنی بر بالشتک هوا، به تیپ پلاستیکی یکبار مصرف آن بستگی دارد. برخلاف تیپ های پلاستیکی سیستم های مبتنی بر بالشتک هوا، تیپ سیستم های جابجایی مثبت دارای یک پیستون یکپارچه است که در حین پیپت کردن (شکل 3) و فرآیند دیسپنس واقعی به میله پیستون دستگاه متصل است. تیپ ها به طور ویژه برای استفاده در سیستم های جابجایی مثبت طراحی شده اند و نمی توان آنها را با تیپ های خارجی جایگزین کرد.
شکل بالا عملکرد این نوع میکروپیپت ها را نشان می دهد. برای آمادگی جهت آسپیراسیون مایع (1)، دکمه حجم برداری تا ایستگاه اول فشار داده می شود و پیستون به سمت پایین به موقعیت مربوطه حرکت می کند. برای آسپیراسیون مایع (2)، تیپ به صورت عمودی و به اندازه چند میلی متر در مایع غوطه ور می شود، سپس دکمه حجم برداری به آرامی رها می شود تا به آرامی به عقب برگردد، در این حالت، پیستون به سمت بالا حرکت می کند و حجم مایع مورد نیاز، توسط خلاء جزئی که تولید می شود به درون تیپ آسپیره می شود. برای دیسپنس مایع (3)، دکمه حجم برداری به آرامی تا اولین ایستگاه فشار داده میشود (measuring stroke). در این حالت، پیستون در تیپ توسط میله پیستون پیپت به سمت پایین حرکت می کند، بنابراین مایع از تیپ خارج می شود. سپس، در حالیکه دکمه حجم برداری بصورت فشرده نگه داشته شده است، تیپ به دیواره ظرف کشیده می شود تا مایع چسبیده به آن به ظرف منتقل شود. برای اجکت تیپ (4)، دکمه حجم برداری تا آخر فشار داده می شود.
منبع
1.Fundamentals of dispensing, Kornelia Ewald, Eppendorf AG, Hamburg, Germany, USERGUIDE No. 19 I June 2015
کارشناسی ارشد ژنتیک انسانی و علاقمند به نویسندگی و ترجمه در حوزه علوم آزمایشگاهی، ژنتیک، علوم سلولی-مولکولی و تجهیزات آزمایشگاهی. مترجم زبان انگلیسی از سال ۱۳۹۰